PhotoRobot Robotic Arm V8 Korisnički priručnik

Sljedeći priručnik za instalaciju pruža tehničke upute za konfiguraciju i rad Robotic Arm V8 od strane PhotoRobot-a. Ove informacije imaju za cilj da podrže prvo postavljanje i rad robotske ruke od strane kupca. Fokusira se na nove kupce koji su nedavno kupili uređaj, kao i na buduće uključivanje operatera proizvodnih linija.
Važan: Uvijek pogledajte PhotoRobot sigurnosne informacije i upute prije nego što nastavite sa bilo kakvom samoinstalacijom, prvom upotrebom, skladištenjem ili servisom PhotoRobot uređaja.
Robotska ruka V8 instalacija i prva upotreba
Hvala vam što ste kupili svoj PhotoRobot uređaj. Odabrali ste proizvod koji sa sobom donosi desetljeća profesionalnog iskustva i inovacija. Genijalan i moderan, PhotoRobot-ov dizajn je s vama na umu. To znači da kad god koristite PhotoRobot, možete biti sigurni da ćete svaki put postići odlične rezultate. Dobrodošli u PhotoRobot.
1. Opis proizvoda
Robotska ruka V8 je dizajnirana za automatsko snimanje višerednih okretaja ili brzo fotografisanje serije fotografija sa različitih visina. Može pomjerati kameru duž dvije ose s glatkom robotskom preciznošću, kontrolišući elevaciju i zamah. Arm se kombinuje sa kompatibilnim fotografskim gramofonima poput Centerless Table , kao i Robotic Turntable, C-Class gramofonima i drugim. Ovo sinhronizuje snimanje slike sa kretanjem montirane kamere i rotacijom proizvoda na gramofonu.

Ključne komponente Robotic Arm V8 uključuju:
- Kontrolna jedinica sistema (odvojeni uređaj za kontrolu robotske ruke).
- Drške za montažu kamere (jedna kratka drška, jedna duga drška ili oba).
- Robotska ruka strojna baza s uvlačivim kotačima za lakši transport.
- Priključna stanica za brzo podešavanje sa kompatibilnim gramofonima i uređajima.
Napomena: Ruka kamere ne oscilira, pomičući kameru duž precizne putanje. Tu je i veliki raspon montaže za fleksibilnost u izboru glava stativa i kamera, kao i funkcije za transport i podešavanje bez napora.
1.1. Robotic Arm V8 Robot Overview
Robotska ruka uređaj se kontrolira preko kontrolne jedinice. To znači da se kontrolna jedinica uključuje i kontrolira sve pokrete _Arm V8.

Napomena: Kontrolna jedinica nije fizički dio ovog uređaja. Fizički je instaliran u stolu bez centra ako se isporučuje zajedno. Ako se Arm V8 isporučuje odvojeno, kontrolna jedinica se nalazi u namjenskom PhotoRobot HD rack kućištu.
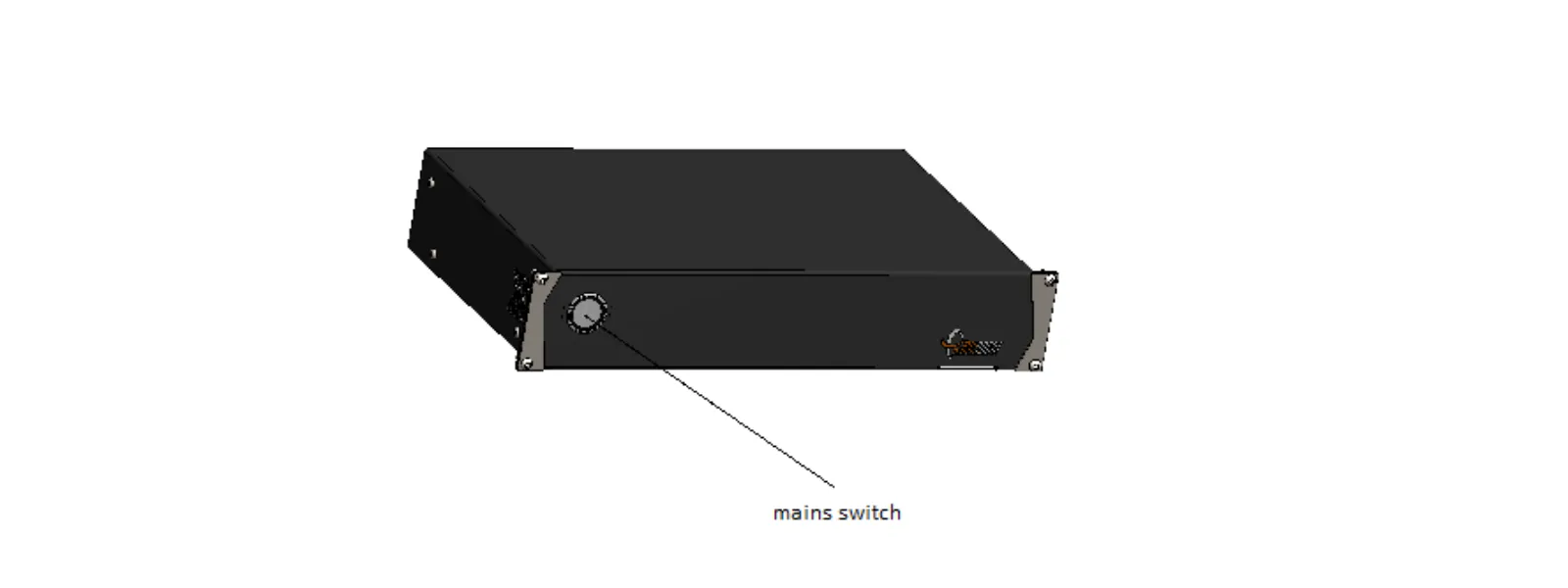
1.2. Električna veza
Sljedeći zahtjevi za električnu vezu također moraju biti ispunjeni za sigurnu instalaciju i rad robotske ruke V8.
- Uređaj mora biti uzemljen.
- Uvijek koristite ispravno instaliranu utičnicu otpornu na udarce.
- Uvjerite se da su električne informacije na natpisnoj pločici u skladu sa napajanjem. Ako se to ne dogodi, obratite se električaru.
- Pazite da ne oštetite mrežni utikač ili mrežni kabel.
- Priključite mrežni utikač u mrežnu utičnicu samo na kraju instalacije. Osigurajte da postoji pristup mrežnom utikaču nakon instalacije.
- Ne dodirujte mrežni kabel ili mrežni utikač mokrim rukama.
- Ne povlačite mrežni kabel da biste isključili uređaj. Uvijek prvo pritisnite mrežni prekidač na kontrolnoj jedinici.
- Ne približavajte se _Arm V8 kada se krećete ili kada je uključen.
- Uvijek pazite na radno područje ovog uređaja.
- Domet lifta je 32 cm.
- Raspon ljuljačke ruke je od 0 do 90 stupnjeva.
Važan: Prva instalacija nakon isporuke od proizvođača mora biti izvršena samo od strane ovlaštenog PhotoRobot-a. Autoritet mora biti ovlašteni distributer ili sam proizvođač. Za samoinstalaciju i servis, uvijek pogledajte i PhotoRobot sigurnosne informacije i upute prije nego što nastavite.
2. Priprema _Arm V8 za rad
2.1. Na osnovu konfiguracije, može postojati jedna kratka drška, jedna duga drška ili oboje.
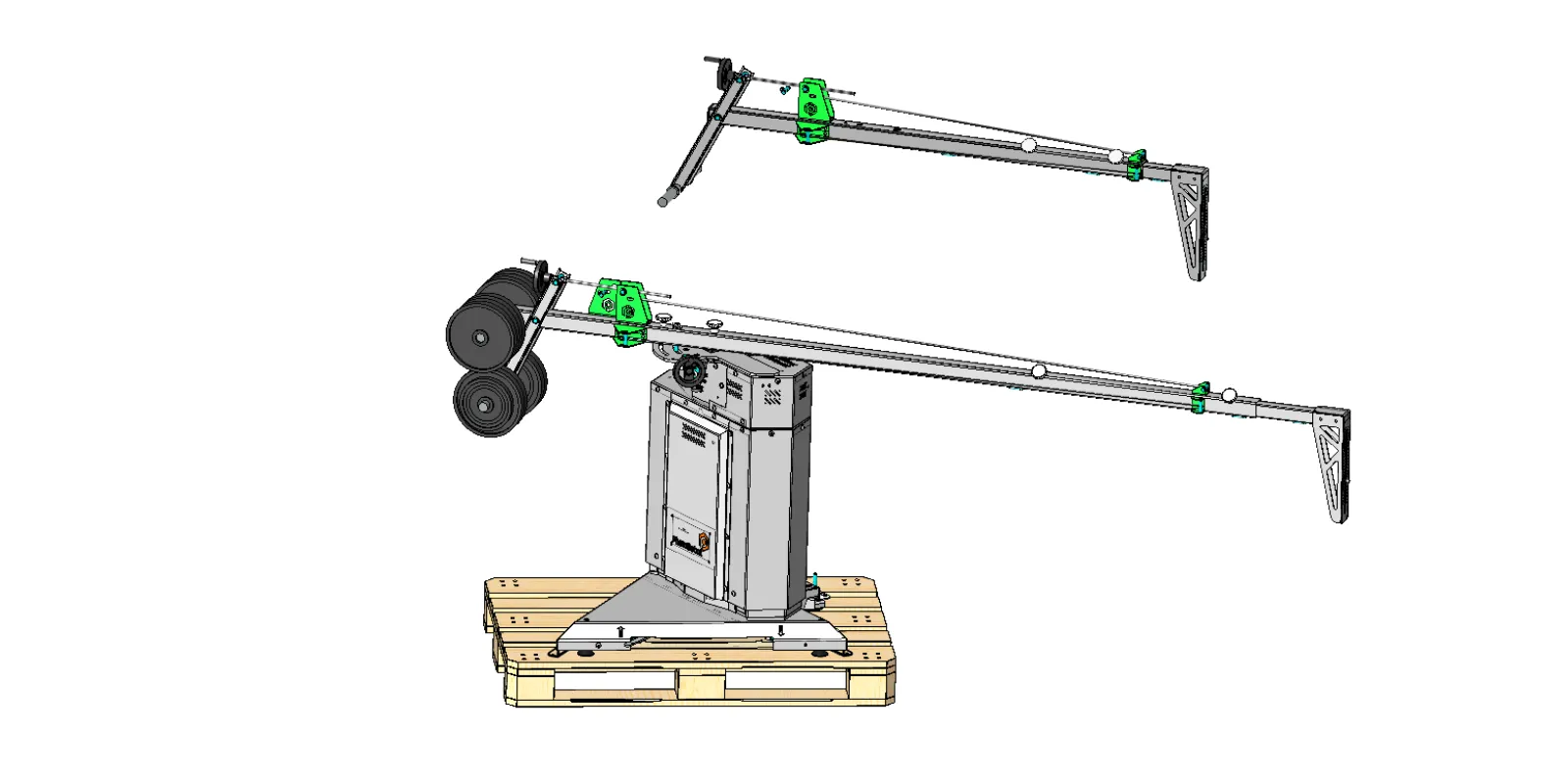
2.2. Raspakirajte sve dijelove i uklonite bazu iz palete.
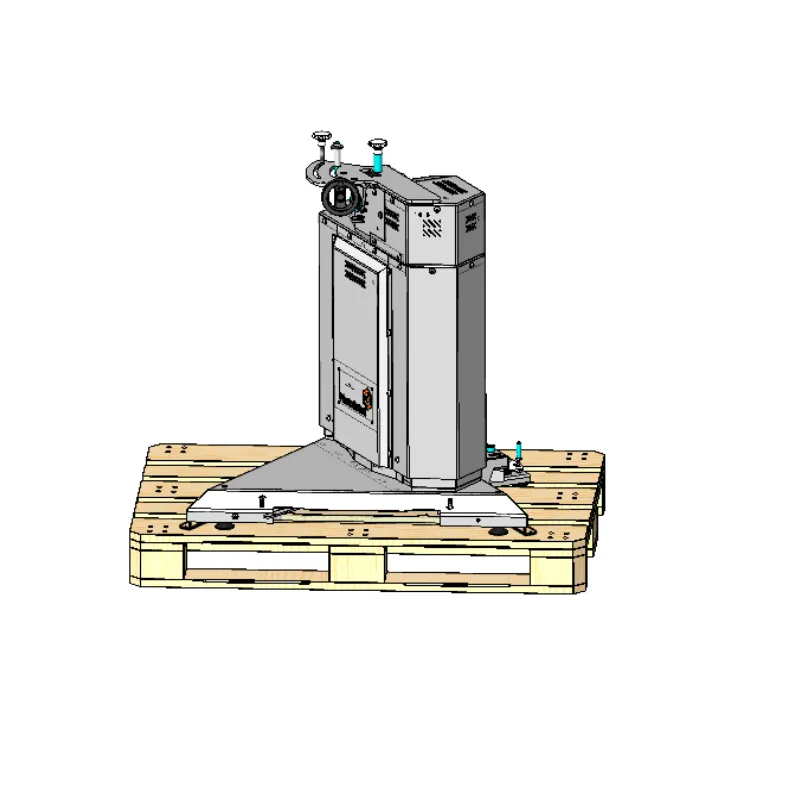
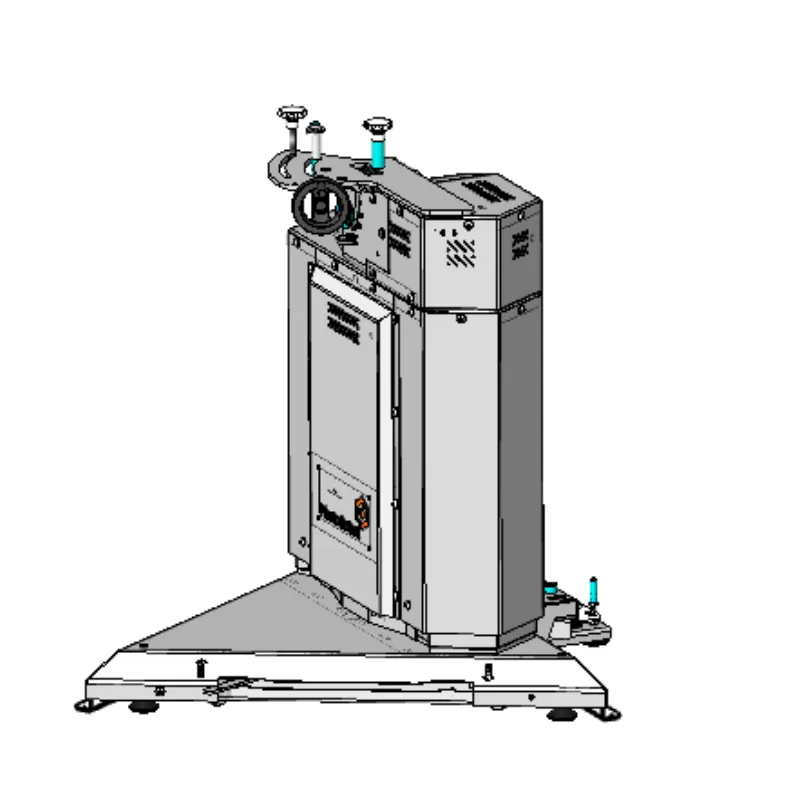
2.3. Konfigurišite gornji dio _Arm V8 za montiranje drške. Uklonite pribor za pričvršćivanje, kao što su matice i podloška.
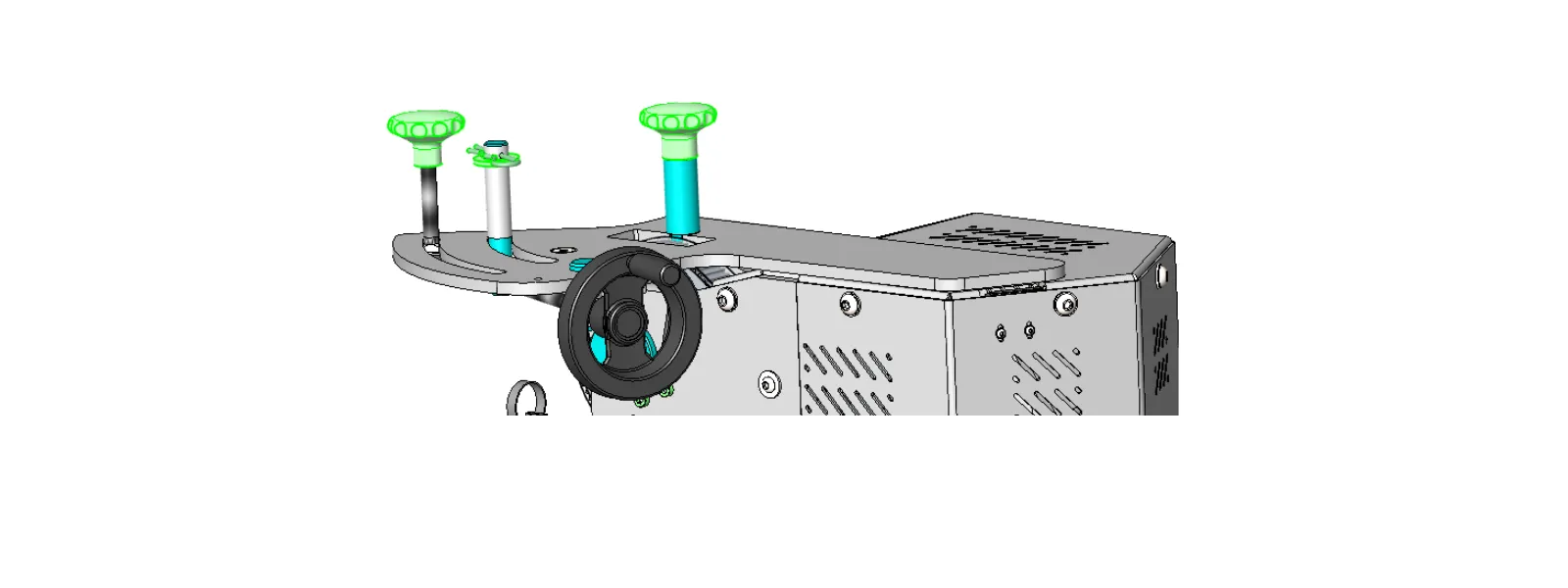
2.4. Postavite dršku na bazu ruke i pričvrstite sve zaštitne dijelove.
2.5. Izvadite Manfrotto zupčanik i pripremite ga za montažu na ruku.

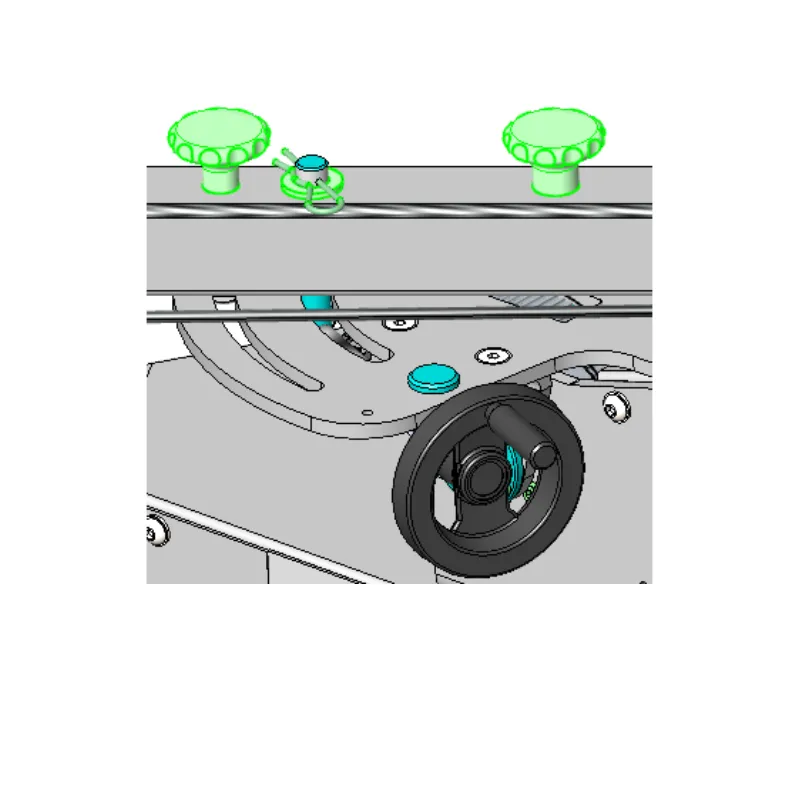
2.6. Pričvrstite Manfrotto glavu zupčanika tako što ćete je pričvrstiti na dršku, a zatim je izravnajte pomoću podesivih ručki 1,2,3.

2.7. Montirajte kameru na Manfrotto zupčaniku i dodajte neke utege na suprotnu stranu drške. Ove težine bi trebale kompenzirati težinu kamere.
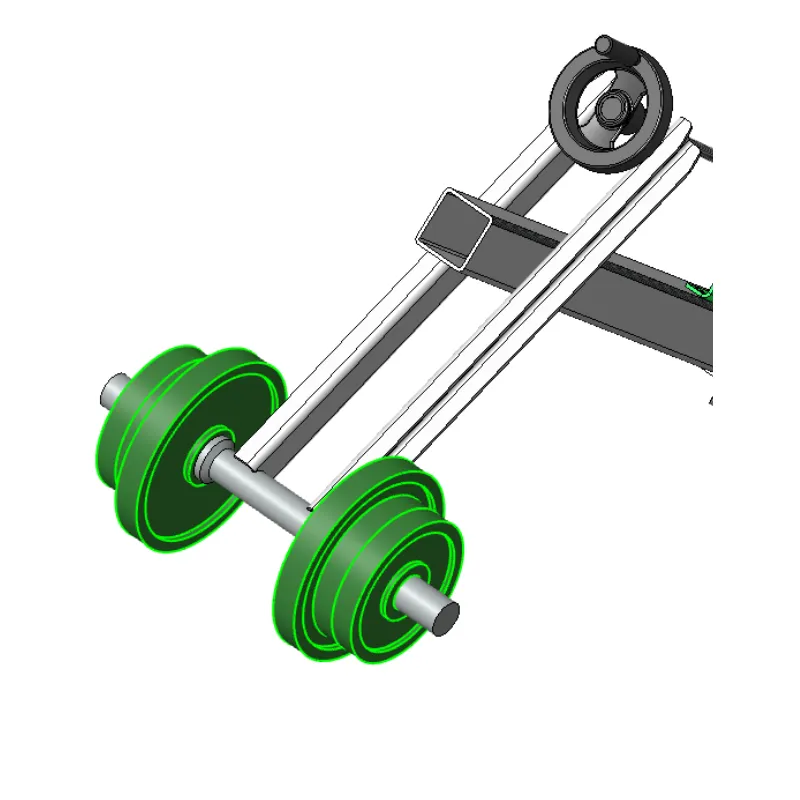
2.8. Imajte na umu da težina kamere treba malo prevladati kako bi se pritisnuo krajnji prekidač kada je ljuljačka ruka u donjem položaju (nula stepeni).
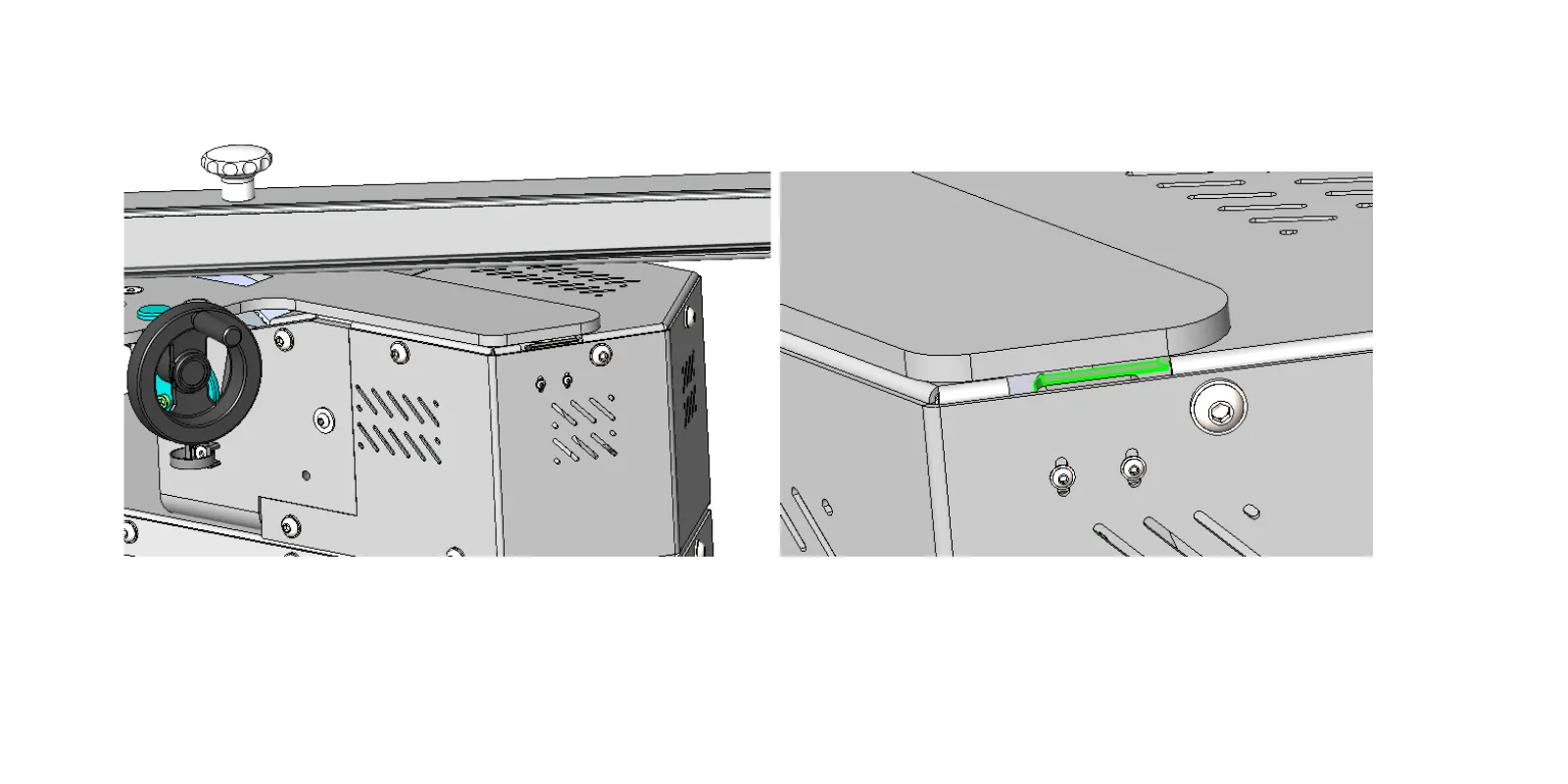
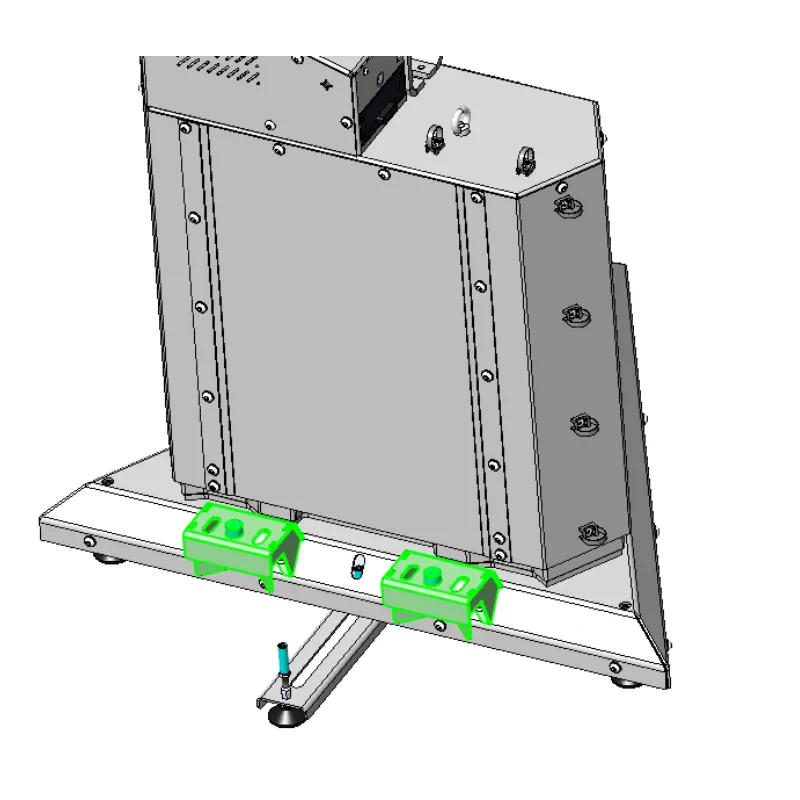
2.9. Montirajte dva dijela priključnog mehanizma na _Arm V8.
3. PhotoRobot prva upotreba
Prije prve upotrebe, razumite koncept ovog rješenja. PhotoRobot je revolucionarna sve-u-jednom oprema za automatizaciju fotografije. Sa tehničke strane, to je modularna jedinica koja se sastoji od hardvera i softvera. Očekuje se da je sam PhotoRobot povezan na istu mrežu kao i računar koji ga koristi.
Važan: Uvijek se obratite PhotoRobot First Use & Basic Testing za tehničke zahtjeve i upute za povezivanje PhotoRobot-a na mrežu.
Općenito, postoje sljedeći preduslovi koje treba ispuniti.
- Mora postojati PhotoRobot kontrolna jedinica spojena na lokalnu mrežu.
- Računar je neophodan za pokretanje servisnog GUI-ja ili softvera operatera koji se zove _Controls.
- Računar mora biti povezan na istu mrežu kao i PhotoRobot kontrolna jedinica.
- Mreža mora biti spojena na internet.
Provjerite parametre sistema distribucije električne energije, npr. napon i frekvenciju.
Povežite kontrolnu jedinicu na mrežu putem ethernet kabla. RJ45 konektor je na poleđini kontrolne jedinice. Postoje sljedeći osnovni mrežni zahtjevi:
- Očekuje se DHCP server u mreži.
- TCP portovi 7777, 7778 komunikacija mora biti dozvoljena.
- UDP emitiranje na portu 6666 mora biti dozvoljeno.
- Potrebna je internetska veza.
- *. photorobot.com pristup mora biti dozvoljen.
- as-unirobot.azurewebsites.net pristup mora biti dozvoljen.
- Pogledajte PhotoRobot Detailed Networking Prerequisites za više informacija ako je potrebno.
- Priključite utikač u utičnicu.
Pritisnite mrežni prekidač na prednjoj ploči kontrolne jedinice. Kada promijeni status iz trepćućeg svjetla u stalno svjetlo, spreman je za rad.
3.1. Pronađite PhotoRobot-ovu IP adresu na LAN-u
Postoje podržane aplikacije za pretraživanje mreže za PhotoRobots.
- Windows - frfind za Windows
- Mac OS X - frfind for macOS
- Android - PhotoRobot Locator u Google Playu
- iPhone, iPad - PhotoRobot Locator na iTunes-u
3.2. Osnovno testiranje PhotoRobot
Na računaru, otvorite web preglednik i unesite IP adresu PhotoRobot u URL formatu, na primjer: https://11.22.33.44 (molim vas, ova adresa je samo primjer - unesite IP adresu koju ste pronašli u gornjem odjeljku).
Ako sve radi kako se očekuje, vidjet ćete osnovni korisnički interfejs sličan slici ispod:

Uključite motore (strelica 1) i pokušajte upravljati bilo kojim pokretnim dijelom robota (strelica 2). Ako se robot kreće na osnovu vaših uputa, spremni ste da redovno koristite svoj PhotoRobot uređaj.


EOS Rebel serija


EOS DSLR serija


EOS M serija bez ogledala


PowerShot serija


Krupni plan / Ručni

Canon EOS Rebel serija nudi DSLR fotoaparate prilagođene početnicima sa solidnim kvalitetom slike, intuitivnim kontrolama i svestranim funkcijama. Idealne za ljubitelje fotografije, ove kamere pružaju pouzdan autofokus, ekrane osjetljive na dodir i Full HD ili 4K video snimanje.
Vezu
Rezolucija (MP)
Rezolucija
Canon EOS DSLR serija pruža visokokvalitetne slike, brzi autofokus i svestranost, što ga čini idealnim za fotografiju i video produkciju.
Vezu
Rezolucija (MP)
Rezolucija
Canon EOS M Mirrorless serija kombinira kompaktan dizajn sa performansama sličnim DSLR-u. Sa izmjenjivim objektivima, brzim autofokusom i visokokvalitetnim senzorima slike, ove kamere su odlične za putnike i kreatore sadržaja koji traže prenosivost bez žrtvovanja kvaliteta slike.
Vezu
Rezolucija (MP)
Rezolucija
Canon PowerShot serija nudi kompaktne, user-friendly fotoaparate za povremene strijelce i entuzijaste. Sa modelima u rasponu od jednostavnih point-and-shoot do naprednih zoom kamera, oni pružaju praktičnost, solidan kvalitet slike i funkcije kao što su stabilizacija slike i 4K video.
Vezu
Rezolucija (MP)
Rezolucija
Canon krupni plan i ručni fotoaparati dizajnirani su za detaljnu fotografiju i video snimke izbliza. Kompaktni i jednostavni za korištenje, nude precizan fokus, snimanje visoke rezolucije i svestrane makro mogućnosti - savršene za vlogiranje, fotografiju proizvoda i kreativne krupne planove.


